遥控汽车玩具工作原理
遥控汽车玩具是一种能够通过无线遥控器远程操控的玩具汽车。它集成了无线通信技术、控制系统、动力系统等多个组成部分,实现了对玩具汽车的远程控制。本文将详细介绍遥控汽车玩具的工作原理。
一、遥控汽车玩具概述

遥控汽车玩具是一种模仿真实汽车的玩具,它具有汽车的基本特征,如方向盘、座椅、车轮等。通过无线遥控器,玩家可以在一定范围内对玩具汽车进行远程操控,实现前进、后退、转弯、加速等动作。
二、无线通信技术

遥控汽车玩具的无线通信技术是实现远程控制的基础。它包括遥控器信号传输和汽车玩具接收装置两部分。
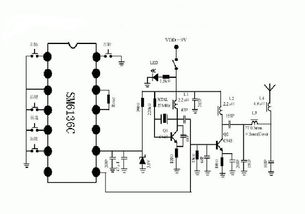
1. 遥控器信号传输
遥控器信号传输是通过无线电波实现的。遥控器内部装有编码器,将操作指令转换为电信号,然后通过无线电波发射器将电信号发送出去。电信号经过空气中的无线电波传播,最终被汽车玩具接收装置接收。
2. 汽车玩具接收装置
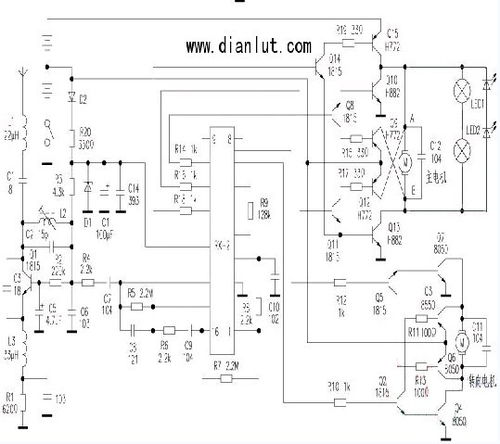
汽车玩具接收装置内部装有无线电波接收器和控制电路,可以接收来自遥控器的无线电波,并将其转换为电信号。控制电路对电信号进行解码,得到操作指令,然后将其传递给控制系统。
三、汽车玩具控制系统

汽车玩具控制系统是遥控汽车玩具的核心部分,它包括控制器设计和驱动电路及电机两部分。
1. 控制器设计
控制器是汽车玩具控制系统的核心,它通过接收来自遥控器的操作指令,解析出相应的控制信号,然后将其传递给驱动电路及电机。控制器可以采用微控制器或单片机等芯片来实现。
2. 驱动电路及电机
驱动电路及电机是实现玩具汽车动作的关键部分。驱动电路是将控制信号转换为电信号的电路,它将电信号传递给电机,使电机转动。电机一般采用直流电机或步进电机等类型。
四、动力系统与驱动方式

遥控汽车玩具的动力系统包括电动机及其驱动和转向系统两部分。
1. 电动机及其驱动
电动机是遥控汽车玩具的动力源,它通过驱动电路及电机转动,为玩具汽车提供动力。电动机可以采用有刷直流电机、无刷直流电机或步进电机等多种类型。驱动电路通过调节电机的电压和电流来控制电机的转速和转矩。
2. 转向系统
转向系统是实现玩具汽车转弯的关键部分。它包括方向盘、转向器、转向电机等部件。方向盘上的操作指令通过转向器传递给转向电机,转向电机通过调整车轮的方向来实现转弯动作。
五、安全与维护
遥控汽车玩具的安全与维护是保证其正常运行和使用寿命的重要环节。以下是一些常见的安全措施和故障排除方法。
1. 安全措施
在设计和制造遥控汽车玩具时,应考虑以下安全措施:(1)采用低电压电池供电,避免高电压对人体造成伤害;(2)在电池充电时,应使用合适的充电器,并避免过充、过放;(3)在玩具汽车的控制系统中,应设置安全限制和保护措施,如最大速度、最大加速度等;(4)在产品包装和说明书上应明确告知用户安全使用方法和注意事项。
2. 常见故障及排除
在使用遥控汽车玩具的过程中,可能会出现一些故障,以下是一些常见的故障及排除方法:(1)遥控器失灵:检查遥控器电池是否充足,或者尝试重新对码;(2)玩具汽车无法启动:检查电池是否接触良好,或者更换电池;(3)玩具汽车行驶不顺畅:检查路面是否平整,或者更换车轮;