遥控汽车玩具工作原理
1. 遥控汽车玩具概述
遥控汽车玩具是一种通过无线电遥控器远程控制汽车模型的运动和动作的玩具。这种玩具可以让孩子们或者成年人通过遥控器来操作汽车模型,体验驾驶的乐趣。遥控汽车玩具通常由遥控器、接收器和汽车模型三部分组成。
2. 无线通信技术
无线通信技术是遥控汽车玩具的核心技术,它包括信号的传输、接收和处理。在遥控汽车玩具中,常用的无线通信技术包括射频(RF)、红外线(IR)和蓝牙等。其中,射频技术因其传输距离远、穿透能力强而得到广泛应用。
2. 1 遥控器信号传输
遥控器信号传输是通过无线电波将控制指令从遥控器发送到接收器。遥控器通常包含按键、摇杆和指示灯等部件,通过编码器将操作转换为数字信号,再通过射频芯片将数字信号调制到无线电波上,发送出去。
2. 2 汽车玩具接收装置
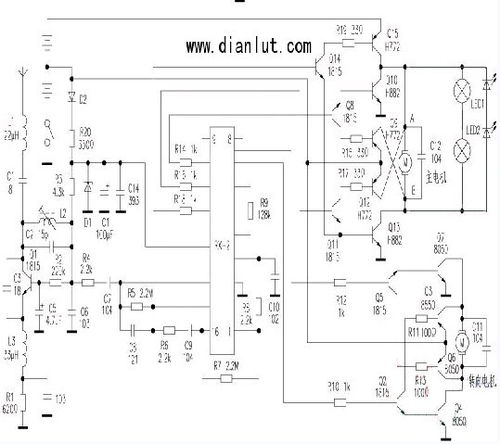
汽车玩具接收装置负责接收遥控器发送的无线电波,并将其转换为数字信号,再通过解码器还原出控制指令,传输给控制系统。接收装置通常由射频芯片、解码器和处理器等组成。
3. 汽车玩具控制系统
汽车玩具控制系统是遥控汽车玩具的核心部分,它负责处理控制指令,控制汽车模型的运动和动作。控制系统由控制器、驱动电路和驱动器等组成。
3. 1 控制器设计
控制器是控制系统的核心,它负责处理控制指令,并将指令转换为电机转速和方向等参数,控制汽车模型的运动。控制器通常采用微控制器或单片机构成。
3. 2 驱动电路及驱动器
驱动电路是连接控制器和电机的桥梁,它负责将控制器的指令转换为电机的运动参数。驱动器通常由功率放大器、保护电路和接口等组成,它将电机的转速和方向等参数转换为实际运动。
4. 汽车玩具运动模式
遥控汽车玩具的运动模式包括前行、倒车、转弯以及速度与加速度控制等。这些运动模式是通过控制器的不同指令来实现的。例如,通过改变驱动电路的输出参数,可以控制电机的转速和方向,从而实现不同的运动模式。
4. 1 前行、倒车及转弯
前行、倒车和转弯是遥控汽车玩具的基本运动模式。通过控制器的不同指令,可以改变电机的转速和方向,使汽车模型实现前行、倒车和转弯等动作。
4. 2 速度与加速度控制
速度与加速度控制是遥控汽车玩具的重要性能指标。通过控制器调整驱动电路的输出参数,可以控制电机的转速和扭矩,实现不同的速度和加速度控制。例如,可以通过调整驱动电路的占空比来控制电机的平均电流,从而实现无级调速。
5. 遥控汽车玩具的优化与发展
随着科技的不断进步,遥控汽车玩具也在不断发展和优化。一方面,通过提高无线通信技术的传输速度和稳定性,可以提升遥控汽车玩具的性能;另一方面,通过引入更多的智能化功能,如自动避障、自动跟随等,可以增加遥控汽车玩具的趣味性和互动性。同时,随着人们对于玩具安全性的关注度不断提高,安全性增强也成为了遥控汽车玩具的一个重要发展方向。例如,通过增加过流保护、过压保护等功能来确保儿童的安全使用。